Loading...
Searching...
No Matches
ompl::base::Constraint Class Reference
Definition of a differentiable holonomic constraint on a configuration space. See Constrained Planning for more details. More...
#include <ompl/base/Constraint.h>
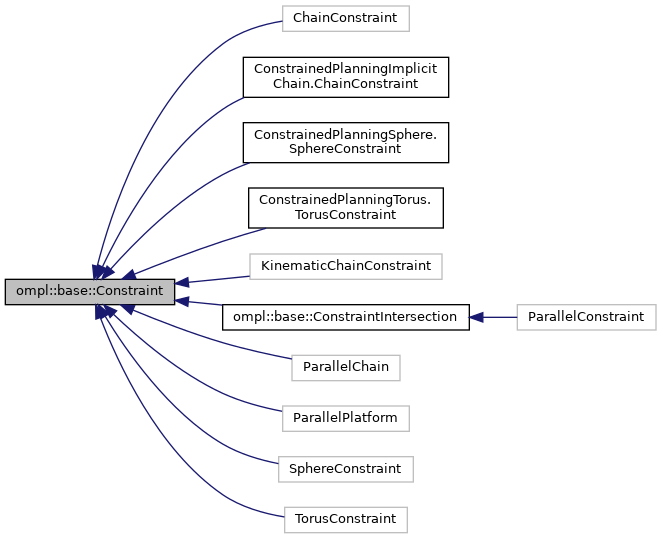
Inheritance diagram for ompl::base::Constraint:
Detailed Description
Definition of a differentiable holonomic constraint on a configuration space. See Constrained Planning for more details.
Definition at line 75 of file Constraint.h.
The documentation for this class was generated from the following file:
- ompl/base/Constraint.h