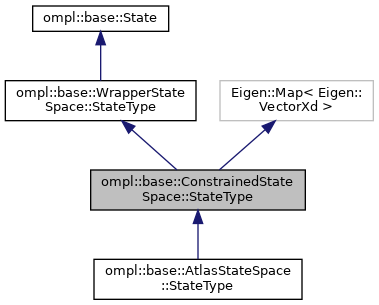
A State in a ConstrainedStateSpace, represented as a dense real vector of values. For convenience and efficiency of various Constraint related operations, this State inherits from Eigen::Map<Eigen::VectorXd>, mapping the underlying dense double vector into an Eigen::VectorXd. Note that this state type inherits from WrapperStateSpace::StateType, and as such the underlying state can be accessed by getState(). More...
#include <ompl/base/spaces/constraint/ConstrainedStateSpace.h>
Public Member Functions | |
| StateType (const ConstrainedStateSpace *space) | |
| Constructor. Requires space to setup information about underlying state. | |
| void | copy (const Eigen::Ref< const Eigen::VectorXd > &other) |
| Copy the contents from a vector into this state. Uses the underlying copy operator used by Eigen for dense vectors. | |
| Public Member Functions inherited from ompl::base::WrapperStateSpace::StateType | |
| StateType (State *state) | |
| Constructor. Takes a reference state to the underlying state. | |
| const State * | getState () const |
| Get a const pointer to the underlying state. | |
| State * | getState () |
| Get a pointer to the underlying state. | |
| Public Member Functions inherited from ompl::base::State | |
| template<class T> | |
| const T * | as () const |
| Cast this instance to a desired type. | |
| template<class T> | |
| T * | as () |
| Cast this instance to a desired type. | |
Additional Inherited Members | |
| Protected Attributes inherited from ompl::base::WrapperStateSpace::StateType | |
| State * | state_ |
| Underlying state. | |
Detailed Description
A State in a ConstrainedStateSpace, represented as a dense real vector of values. For convenience and efficiency of various Constraint related operations, this State inherits from Eigen::Map<Eigen::VectorXd>, mapping the underlying dense double vector into an Eigen::VectorXd. Note that this state type inherits from WrapperStateSpace::StateType, and as such the underlying state can be accessed by getState().
Definition at line 170 of file ConstrainedStateSpace.h.
Constructor & Destructor Documentation
◆ StateType()
|
inline |
Constructor. Requires space to setup information about underlying state.
Definition at line 174 of file ConstrainedStateSpace.h.
Member Function Documentation
◆ copy()
|
inline |
Copy the contents from a vector into this state. Uses the underlying copy operator used by Eigen for dense vectors.
Definition at line 183 of file ConstrainedStateSpace.h.
The documentation for this class was generated from the following file:
- ompl/base/spaces/constraint/ConstrainedStateSpace.h