A StateSpace that has a Constraint imposed upon it. Underlying space functions are passed to the ambient space, and the constraint is used to inform any manifold related operations. setSpaceInformation() must be called in order for collision checking to be done in tandem with manifold traversal. More...
#include <ompl/base/spaces/constraint/ConstrainedStateSpace.h>
Classes | |
| class | StateType |
| A State in a ConstrainedStateSpace, represented as a dense real vector of values. For convenience and efficiency of various Constraint related operations, this State inherits from Eigen::Map<Eigen::VectorXd>, mapping the underlying dense double vector into an Eigen::VectorXd. Note that this state type inherits from WrapperStateSpace::StateType, and as such the underlying state can be accessed by getState(). More... | |
Public Types | |
| enum | SanityChecks { CONSTRAINED_STATESPACE_SAMPLERS = (1 << 1), CONSTRAINED_STATESPACE_GEODESIC_SATISFY = (1 << 2), CONSTRAINED_STATESPACE_GEODESIC_CONTINUITY = (1 << 3), CONSTRAINED_STATESPACE_GEODESIC_INTERPOLATE = (1 << 4), CONSTRAINED_STATESPACE_JACOBIAN = (1 << 5) } |
| Flags used in a bit mask for constrained state space sanity checks, constraintSanityChecks(). More... | |
 Public Types inherited from ompl::base::StateSpace Public Types inherited from ompl::base::StateSpace | |
| enum | SanityChecks { STATESPACE_DISTANCE_DIFFERENT_STATES = (1 << 1), STATESPACE_DISTANCE_SYMMETRIC = (1 << 2), STATESPACE_INTERPOLATION = (1 << 3), STATESPACE_TRIANGLE_INEQUALITY = (1 << 4), STATESPACE_DISTANCE_BOUND = (1 << 5), STATESPACE_RESPECT_BOUNDS = (1 << 6), STATESPACE_ENFORCE_BOUNDS_NO_OP = (1 << 7), STATESPACE_SERIALIZATION = (1 << 8) } |
| Flags to use in a bit mask for state space sanity checks. Some basic checks do not have flags associated (they are always executed; for example, whether copyState() works as expected) More... | |
| using | StateType = ompl::base::State |
| Define the type of state allocated by this space. | |
Public Member Functions | |
| ConstrainedStateSpace (const StateSpacePtr &ambientSpace, const ConstraintPtr &constraint) | |
| Construct a constrained space from an ambientSpace and a constraint. | |
State Space Related Operations | |
| bool | isMetricSpace () const override |
| Returns false as the implicit constrained configuration space defined by the constraint is not metric with respect to the ambient configuration space's metric. | |
| void | setSpaceInformation (SpaceInformation *si) |
| Sets the space information for this state space. Required for collision checking in manifold traversal. | |
| void | setup () override |
| Final setup for the space. | |
| virtual void | clear () |
| Clear any allocated memory from the state space. | |
| State * | allocState () const override |
| Allocate a new state in this space. | |
| void | constrainedSanityChecks (unsigned int flags) const |
| Do some sanity checks relating to discrete geodesic computation and constraint satisfaction. See SanityChecks flags. | |
| void | sanityChecks () const override |
| Perform both constrained and regular sanity checks. | |
| unsigned int | validSegmentCount (const State *s1, const State *s2) const override |
| Return the valid segment count on the manifold, as valid segment count is determined by delta_ and lambda_. | |
Constrained Planning | |
| void | interpolate (const State *from, const State *to, double t, State *state) const override |
| Find a state between from and to around time t, where t = 0 is from, and t = 1 is the final state reached by discreteGeodesic(from, to, true, ...), which may not be to. State returned in state. | |
| virtual bool | discreteGeodesic (const State *from, const State *to, bool interpolate=false, std::vector< State * > *geodesic=nullptr) const =0 |
| Traverse the manifold from from toward to. Returns true if we reached to, and false if we stopped early for any reason, such as a collision or traveling too far. No collision checking is performed if interpolate is true. If geodesic is not nullptr, the sequence of intermediates is saved to it, including a copy of from, as well as the final state, which is a copy of to if we reached to. Caller is responsible for freeing states returned in geodesic. Needs to be implemented by any constrained state space. | |
| virtual State * | geodesicInterpolate (const std::vector< State * > &geodesic, double t) const |
| Like interpolate(...), but interpolates between intermediate states already supplied in stateList from a previous call to discreteGeodesic(..., geodesic). The from and to states are the first and last elements stateList. Returns a pointer to a state in geodesic. | |
Setters and Getters | |
| void | setDelta (double delta) |
| Set delta, the step size for traversing the manifold and collision checking. Default defined by ompl::magic::CONSTRAINED_STATE_SPACE_DELTA. | |
| void | setLambda (double lambda) |
| Set lambda, where lambda * distance(x, y) is the maximum length of the geodesic x to y. Additionally, lambda * delta is the greatest distance a point can diverge from its previous step, to preserve continuity. Must be greater than 1. | |
| double | getDelta () const |
| Get delta, the step size across the manifold. | |
| double | getLambda () const |
| Get lambda (see setLambda()). | |
| unsigned int | getAmbientDimension () const |
| Returns the dimension of the ambient space. | |
| unsigned int | getManifoldDimension () const |
| Returns the dimension of the manifold. | |
| const ConstraintPtr | getConstraint () const |
| Returns the constraint that defines the underlying manifold. | |
| Public Member Functions inherited from ompl::base::WrapperStateSpace | |
| WrapperStateSpace (const StateSpacePtr &space) | |
| bool | isCompound () const override |
| Check if the state space is compound. | |
| bool | isDiscrete () const override |
| Check if the set of states is discrete. More... | |
| bool | isHybrid () const override |
| Check if this is a hybrid state space (i.e., both discrete and continuous components exist) | |
| bool | isMetricSpace () const override |
| Return true if the distance function associated with the space is a metric. | |
| bool | hasSymmetricDistance () const override |
| Check if the distance function on this state space is symmetric, i.e. distance(s1,s2) = distance(s2,s1). Default implementation returns true. | |
| bool | hasSymmetricInterpolate () const override |
| Check if the interpolation function on this state space is symmetric, i.e. interpolate(from, to, t, state) = interpolate(to, from, 1-t, state). Default implementation returns true. | |
| const std::string & | getName () const |
| void | setName (const std::string &name) |
| int | getType () const |
| bool | includes (const StateSpacePtr &other) const |
| bool | includes (const StateSpace *other) const |
| bool | covers (const StateSpacePtr &other) const |
| bool | covers (const StateSpace *other) const |
| ParamSet & | params () |
| const ParamSet & | params () const |
| Get the parameters for this space. | |
| double | getLongestValidSegmentFraction () const override |
| When performing discrete validation of motions, the length of the longest segment that does not require state validation needs to be specified. This function returns this length, for this state space, as a fraction of the space's maximum extent. | |
| void | setLongestValidSegmentFraction (double segmentFraction) override |
| When performing discrete validation of motions, the length of the longest segment that does not require state validation needs to be specified. This function sets this length as a fraction of the space's maximum extent. More... | |
| unsigned int | validSegmentCount (const State *state1, const State *state2) const override |
| Count how many segments of the "longest valid length" fit on the motion from state1 to state2. | |
| void | setValidSegmentCountFactor (unsigned int factor) override |
| Set factor to be the value to multiply the return value of validSegmentCount(). By default, this value is 1. The higher the value, the smaller the size of the segments considered valid. The effect of this function is immediate (setup() does not need to be called). | |
| unsigned int | getValidSegmentCountFactor () const override |
| Get the value used to multiply the return value of validSegmentCount(). | |
| double | getLongestValidSegmentLength () const override |
| Get the longest valid segment at the time setup() was called. | |
| void | computeSignature (std::vector< int > &signature) const override |
| Compute an array of ints that uniquely identifies the structure of the state space. The first element of the signature is the number of integers that follow. | |
| unsigned int | getDimension () const override |
| Get the dimension of the space (not the dimension of the surrounding ambient space) | |
| double | getMaximumExtent () const override |
| Get the maximum value a call to distance() can return (or an upper bound). For unbounded state spaces, this function can return infinity. More... | |
| double | getMeasure () const override |
| Get a measure of the space (this can be thought of as a generalization of volume) | |
| void | enforceBounds (State *state) const override |
| Bring the state within the bounds of the state space. For unbounded spaces this function can be a no-op. | |
| bool | satisfiesBounds (const State *state) const override |
| Check if a state is inside the bounding box. For unbounded spaces this function can always return true. | |
| void | copyState (State *destination, const State *source) const override |
| Copy a state to another. The memory of source and destination should NOT overlap. More... | |
| double | distance (const State *state1, const State *state2) const override |
| Computes distance between two states. This function satisfies the properties of a metric if isMetricSpace() is true, and its return value will always be between 0 and getMaximumExtent() | |
| unsigned int | getSerializationLength () const override |
| Get the number of chars in the serialization of a state in this space. | |
| void | serialize (void *serialization, const State *state) const override |
| Write the binary representation of state to serialization. | |
| void | deserialize (State *state, const void *serialization) const override |
| Read the binary representation of a state from serialization and write it to state. | |
| bool | equalStates (const State *state1, const State *state2) const override |
| Checks whether two states are equal. | |
| void | interpolate (const State *from, const State *to, double t, State *state) const override |
| Computes the state that lies at time t in [0, 1] on the segment that connects from state to to state. The memory location of state is not required to be different from the memory of either from or to. | |
| StateSamplerPtr | allocDefaultStateSampler () const override |
| Allocate an instance of the default uniform state sampler for this space. | |
| State * | allocState () const override |
| Allocate a state that can store a point in the described space. | |
| void | freeState (State *state) const override |
| Free the memory of the allocated state. | |
| double * | getValueAddressAtIndex (State *state, unsigned int index) const override |
| Many states contain a number of double values. This function provides a means to get the memory address of a double value from state state located at position index. The first double value is returned for index = 0. If index is too large (does not point to any double values in the state), the return value is nullptr. More... | |
| const double * | getValueAddressAtIndex (const State *state, unsigned int index) const override |
| Const variant of the same function as above;. | |
| const std::vector< ValueLocation > & | getValueLocations () const override |
| Get the locations of values of type double contained in a state from this space. The order of the values is consistent with getValueAddressAtIndex(). The setup() function must have been previously called. | |
| const std::map< std::string, ValueLocation > & | getValueLocationsByName () const override |
| Get the named locations of values of type double contained in a state from this space. The setup() function must have been previously called. | |
| double * | getValueAddressAtLocation (State *state, const ValueLocation &loc) const override |
| Get a pointer to the double value in state that loc points to. | |
| const double * | getValueAddressAtLocation (const State *state, const ValueLocation &loc) const override |
| Const variant of the same function as above;. | |
| double * | getValueAddressAtName (State *state, const std::string &name) const override |
| Get a pointer to the double value in state that name points to. | |
| const double * | getValueAddressAtName (const State *state, const std::string &name) const override |
| Const variant of the same function as above;. | |
| void | copyToReals (std::vector< double > &reals, const State *source) const override |
| Copy all the real values from a state source to the array reals using getValueAddressAtLocation() | |
| void | copyFromReals (State *destination, const std::vector< double > &reals) const override |
| Copy the values from reals to the state destination using getValueAddressAtLocation() | |
| void | registerProjections () override |
| Register the projections for this state space. Usually, this is at least the default projection. These are implicit projections, set by the implementation of the state space. This is called by setup(). | |
| void | printState (const State *state, std::ostream &out=std::cout) const override |
| Print a state to a stream. | |
| void | printSettings (std::ostream &out) const override |
| Print the settings for this state space to a stream. | |
| void | printProjections (std::ostream &out) const override |
| Print the list of registered projections. This function is also called by printSettings() | |
| void | sanityChecks (double zero, double eps, unsigned int flags) const override |
| Perform sanity checks for this state space. Throws an exception if failures are found. More... | |
| void | sanityChecks () const override |
| Convenience function that allows derived state spaces to choose which checks should pass (see SanityChecks flags) and how strict the checks are. This just calls sanityChecks() with some default arguments. | |
| StateSamplerPtr | allocSubspaceStateSampler (const StateSpace *subspace) const override |
| Allocate a sampler that actually samples only components that are part of subspace. | |
| void | computeLocations () override |
| Compute the location information for various components of the state space. Either this function or setup() must be called before any calls to getValueAddressAtName(), getValueAddressAtLocation() (and other functions where those are used). | |
| void | setup () override |
| Perform final setup steps. This function is automatically called by the SpaceInformation. If any default projections are to be registered, this call will set them and call their setup() functions. It is safe to call this function multiple times. At a subsequent call, projections that have been previously user configured are not re-instantiated, but their setup() method is still called. | |
| const StateSpacePtr & | getSpace () const |
| Public Member Functions inherited from ompl::base::StateSpace | |
| StateSpace (const StateSpace &)=delete | |
| StateSpace & | operator= (const StateSpace &)=delete |
| StateSpace () | |
| Constructor. Assigns a unique name to the space. | |
| template<class T > | |
| T * | as () |
| Cast this instance to a desired type. More... | |
| template<class T > | |
| const T * | as () const |
| Cast this instance to a desired type. More... | |
| const std::string & | getName () const |
| Get the name of the state space. | |
| void | setName (const std::string &name) |
| Set the name of the state space. | |
| int | getType () const |
| Get the type of the state space. The type can be used to verify whether two space instances are of the same type (e.g., SO2) | |
| bool | includes (const StateSpacePtr &other) const |
| Return true if other is a space included (perhaps equal, perhaps a subspace) in this one. | |
| bool | includes (const StateSpace *other) const |
| Return true if other is a space included (perhaps equal, perhaps a subspace) in this one. | |
| bool | covers (const StateSpacePtr &other) const |
| Return true if other is a space that is either included (perhaps equal, perhaps a subspace) in this one, or all of its subspaces are included in this one. | |
| bool | covers (const StateSpace *other) const |
| Return true if other is a space that is either included (perhaps equal, perhaps a subspace) in this one, or all of its subspaces are included in this one. | |
| ParamSet & | params () |
| Get the parameters for this space. | |
| const ParamSet & | params () const |
| Get the parameters for this space. | |
| State * | cloneState (const State *source) const |
| Clone a state. | |
| virtual StateSamplerPtr | allocStateSampler () const |
| Allocate an instance of the state sampler for this space. This sampler will be allocated with the sampler allocator that was previously specified by setStateSamplerAllocator() or, if no sampler allocator was specified, allocDefaultStateSampler() is called. | |
| void | setStateSamplerAllocator (const StateSamplerAllocator &ssa) |
| Set the sampler allocator to use. | |
| void | clearStateSamplerAllocator () |
| Clear the state sampler allocator (reset to default) | |
| void | registerProjection (const std::string &name, const ProjectionEvaluatorPtr &projection) |
| Register a projection for this state space under a specified name. | |
| void | registerDefaultProjection (const ProjectionEvaluatorPtr &projection) |
| Register the default projection for this state space. | |
| ProjectionEvaluatorPtr | getProjection (const std::string &name) const |
| Get the projection registered under a specific name. | |
| ProjectionEvaluatorPtr | getDefaultProjection () const |
| Get the default projection. | |
| bool | hasProjection (const std::string &name) const |
| Check if a projection with a specified name is available. | |
| bool | hasDefaultProjection () const |
| Check if a default projection is available. | |
| const std::map< std::string, ProjectionEvaluatorPtr > & | getRegisteredProjections () const |
| Get all the registered projections. | |
| StateSamplerPtr | allocSubspaceStateSampler (const StateSpacePtr &subspace) const |
| Allocate a sampler that actually samples only components that are part of subspace. | |
| State * | getSubstateAtLocation (State *state, const SubstateLocation &loc) const |
| Get the substate of state that is pointed to by loc. | |
| const State * | getSubstateAtLocation (const State *state, const SubstateLocation &loc) const |
| Get the substate of state that is pointed to by loc. | |
| const std::map< std::string, SubstateLocation > & | getSubstateLocationsByName () const |
| Get the list of known substate locations (keys of the map corrspond to names of subspaces) | |
| void | getCommonSubspaces (const StateSpacePtr &other, std::vector< std::string > &subspaces) const |
| Get the set of subspaces that this space and other have in common. The computed list of subspaces does not contain spaces that cover each other, even though they may be common, as that is redundant information. | |
| void | getCommonSubspaces (const StateSpace *other, std::vector< std::string > &subspaces) const |
| Get the set of subspaces that this space and other have in common. The computed list of subspaces does not contain spaces that cover each other, even though they may be common, as that is redundant information. | |
| void | diagram (std::ostream &out) const |
| Print a Graphviz digraph that represents the containment diagram for the state space. | |
| void | list (std::ostream &out) const |
| Print the list of all contained state space instances. | |
Protected Attributes | |
| SpaceInformation * | si_ {nullptr} |
| SpaceInformation associated with this space. Required for early collision checking in manifold traversal. | |
| const ConstraintPtr | constraint_ |
| Constraint function that defines the manifold. | |
| const unsigned int | n_ |
| Ambient space dimension. | |
| const unsigned int | k_ |
| Manifold dimension. | |
| double | delta_ |
| Step size when traversing the manifold and collision checking. | |
| double | lambda_ {ompl::magic::CONSTRAINED_STATE_SPACE_LAMBDA} |
| Manifold traversal from x to y is stopped if accumulated distance is greater than d(x,y) times this. Additionally, if d(x, y) is greater than lambda * delta between two points, search is discontinued. | |
| bool | setup_ {false} |
| Whether setup() has been called. | |
| Protected Attributes inherited from ompl::base::WrapperStateSpace | |
| const StateSpacePtr | space_ |
| Protected Attributes inherited from ompl::base::StateSpace | |
| int | type_ |
| A type assigned for this state space. | |
| StateSamplerAllocator | ssa_ |
| An optional state sampler allocator. | |
| double | maxExtent_ |
| The extent of this space at the time setup() was called. | |
| double | longestValidSegmentFraction_ |
| The fraction of the longest valid segment. | |
| double | longestValidSegment_ |
| The longest valid segment at the time setup() was called. | |
| unsigned int | longestValidSegmentCountFactor_ |
| The factor to multiply the value returned by validSegmentCount(). Rarely used but useful for things like doubling the resolution. | |
| std::map< std::string, ProjectionEvaluatorPtr > | projections_ |
| List of available projections. | |
| ParamSet | params_ |
| The set of parameters for this space. | |
| std::vector< ValueLocation > | valueLocationsInOrder_ |
| The value locations for all varliables of type double contained in a state; The locations point to values in the same order as that returned by getValueAddressAtIndex() | |
| std::map< std::string, ValueLocation > | valueLocationsByName_ |
| All the known value locations, by name. The names of state spaces access the first element of a state. RealVectorStateSpace dimensions are used to access individual dimensions. | |
| std::map< std::string, SubstateLocation > | substateLocationsByName_ |
| All the known substat locations, by name. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from ompl::base::StateSpace | |
| static void | Diagram (std::ostream &out) |
| Print a Graphviz digraph that represents the containment diagram for all the instantiated state spaces. | |
| static void | List (std::ostream &out) |
| Print the list of available state space instances. | |
| Static Protected Attributes inherited from ompl::base::StateSpace | |
| static const std::string | DEFAULT_PROJECTION_NAME = "" |
| The name used for the default projection. | |
Detailed Description
A StateSpace that has a Constraint imposed upon it. Underlying space functions are passed to the ambient space, and the constraint is used to inform any manifold related operations. setSpaceInformation() must be called in order for collision checking to be done in tandem with manifold traversal.
- Short Description
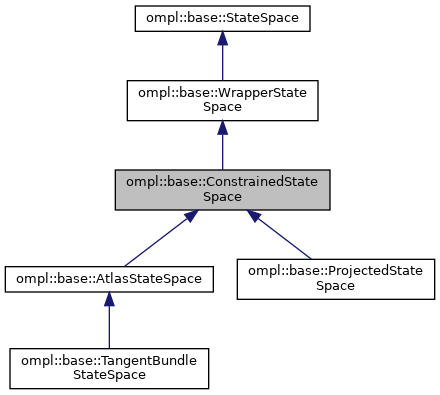
- ConstrainedStateSpace encapsulates the idea of decoupled constrained planning, where the planner and constraint satisfaction methodology are separated. Core to this idea is the augmentation of a state space, rather than the augmentation of a planner. In OMPL, this is implemented as the ConstrainedStateSpace and its concrete implementations: ProjectedStateSpace for projection-based constraint satisfaction, AtlasStateSpace for atlas-based manifold approximation, and TangentBundleStateSpace for a lazy atlas-based approach.
The core benefit of this method is that there is no additional work to make a sampling-based planner plan with constraints (in this case, a differentiable function of a state, implemented in Constraint), enabling mix-and-matching of planners with constraint methodologies, e.g., KPIECE1 with TangentBundleStateSpace, or RRT* with ProjectedStateSpace, and so on.
See Constrained Planning for more details.
- External Documentation
- The following paper describes the idea of decoupled constrained planning, as implemented in OMPL.
Zachary Kingston, Mark Moll, and Lydia E. Kavraki, Exploring Implicit Spaces for Constrained Sampling-Based Planning, International Journal of Robotics Research, 38(10–11):1151–1178, September 2019. DOI: 10.1177/0278364919868530 PrePrint: [PDF]
For more information on constrained sampling-based planning in general, see the following review paper. The sections on projection- and atlas-based planning describe the methods used in the ProjectedStateSpace, AtlasStateSpace, and TangentBundleStateSpace.
Z. Kingston, M. Moll, and L. E. Kavraki, “Sampling-Based Methods for Motion Planning with Constraints,” Annual Review of Control, Robotics, and Autonomous Systems, 2018. DOI: 10.1146/annurev-control-060117-105226 [PDF].
Definition at line 165 of file ConstrainedStateSpace.h.
Member Enumeration Documentation
◆ SanityChecks
Flags used in a bit mask for constrained state space sanity checks, constraintSanityChecks().
Definition at line 170 of file ConstrainedStateSpace.h.
The documentation for this class was generated from the following files:
- ompl/base/spaces/constraint/ConstrainedStateSpace.h
- ompl/base/spaces/constraint/src/ConstrainedStateSpace.cpp