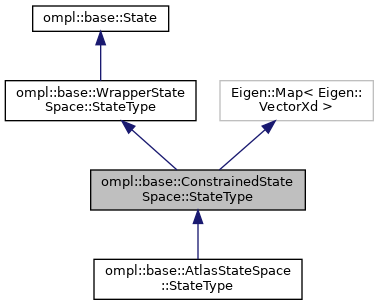
A State in a ConstrainedStateSpace, represented as a dense real vector of values. For convenience and efficiency of various Constraint related operations, this State inherits from Eigen::Map<Eigen::VectorXd>, mapping the underlying dense double vector into an Eigen::VectorXd. Note that this state type inherits from WrapperStateSpace::StateType, and as such the underlying state can be accessed by getState(). More...
#include <ompl/base/spaces/constraint/ConstrainedStateSpace.h>
Public Member Functions | |
| StateType (const ConstrainedStateSpace *space) | |
| Constructor. Requires space to setup information about underlying state. | |
| void | copy (const Eigen::Ref< const Eigen::VectorXd > &other) |
| Copy the contents from a vector into this state. Uses the underlying copy operator used by Eigen for dense vectors. | |
 Public Member Functions inherited from ompl::base::WrapperStateSpace::StateType Public Member Functions inherited from ompl::base::WrapperStateSpace::StateType | |
| StateType (State *state) | |
| Constructor. Takes a reference state to the underlying state. | |
| const State * | getState () const |
| Get a const pointer to the underlying state. | |
| State * | getState () |
| Get a pointer to the underlying state. | |
| Public Member Functions inherited from ompl::base::State | |
| template<class T > | |
| const T * | as () const |
| Cast this instance to a desired type. More... | |
| template<class T > | |
| T * | as () |
| Cast this instance to a desired type. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from ompl::base::WrapperStateSpace::StateType | |
| State * | state_ |
| Underlying state. | |
Detailed Description
A State in a ConstrainedStateSpace, represented as a dense real vector of values. For convenience and efficiency of various Constraint related operations, this State inherits from Eigen::Map<Eigen::VectorXd>, mapping the underlying dense double vector into an Eigen::VectorXd. Note that this state type inherits from WrapperStateSpace::StateType, and as such the underlying state can be accessed by getState().
Definition at line 200 of file ConstrainedStateSpace.h.
The documentation for this class was generated from the following file:
- ompl/base/spaces/constraint/ConstrainedStateSpace.h